- This topic has 7 replies, 2 voices, and was last updated 10 years, 10 months ago by
 Fairey Mary.
Fairey Mary.
- CreatorTopic
- 10/02/2015 at 22:26#10121
 Fairey MaryParticipant
Fairey MaryParticipantI have been looking for an autohelm solution for a while, hoping that maintaining course might help me realise a better set of sail. The likes of the ST1000 seemed sub optimal considering our particular tiller setup.
So when I stumbled upon this freeboard project I thought it was worth a go. It is an open hardware project with an interface board that abstracts the popular marine protocols.
I have been concerning myself with how I could provide the actuator to drive the rudder. The main problem being how to provide a clutch. My aim is to use the minimal amount of power to adjust and lock the helm.
My research has led me to the use of a SAAB convertible hydraulic system as used for the roof. It is a single unit containing electric motor pump reservoir and manifold containing 3 solenoids, it cost me about £50 from a popular auction site ;-). It is also not very heavy and has pressure saftey systems that limit the pressure to 140bar.
I have since found good documentation on the pump. But if anybody has experience designing hydraulic systems I would be most grateful of the help. My hope is that I can re-use the manifold, but I don believe it impossible to create an alternative. I should be able to adjust the gearing by changing the size of the piston.
- CreatorTopic
- AuthorReplies
- 08/03/2015 at 15:38 #10122Fairey MaryParticipant
After much head scratching I have opted for a simpler solution than the SAAB. The BMW mini convertible has a simple two ram solution without solenoids. Simply the motor goes one way the rams go out, reverse the connections and they retract. This arrived as a complete unit with the rams attached so I can see them working. This does not solve the clutch problem but I guess a bypass valve can be gained at a later stage. For now I can focus on the relationship between the compass and the rudder. By swapping the connections on one ram it will retract whilst the other expands. You can see from this picture of Mary that I can attach one ram to each rudder (having two). I should be able to hide the motor and other electronics out of earshot.
 I have most of the electronics now, it is arduino based and I have to admit it is not as effortless as I would have wished. Certain libraries have been compiled with certain versions of the arduino tools and need rework to work with later versions. I am arguing with the GPS at the moment.
I have most of the electronics now, it is arduino based and I have to admit it is not as effortless as I would have wished. Certain libraries have been compiled with certain versions of the arduino tools and need rework to work with later versions. I am arguing with the GPS at the moment.The shopping list so far is something like;
Arduino Due £40
Freeboard £70
Potentiometer £15
ArduIMU £50 ( this is the compass and other movement sensors, have a look on youtube )
EM406A GPS £20
Mini Hydraulic motor with Rams £130
Looking at it that way does look like a fools errand. Particularly when you consider that I will need to implement a bypass valve. I also have risks, the rams might not be fast enough… But I have tested most bits in isolation and think it is looking OK.
- 16/03/2015 at 21:42 #10123Fairey MaryParticipant
I should rename this blog, “If you want a job done efficiently give it to a lazy person. You would be surprised how much effort they will put in to avoid working”.
Anyway, I hope somebody out their is finding this interesting…I have got as far as getting all the bits together and I have started looking at the software involved. I have stood on the shoulders of giants and created an NMEA database. My aim is now to create functions that populate this as well as using the sensors that generate this data, such as the GPS. For example I will generate rudder position data and add this to the database.The issue I am now finding is that the rudder control is not a simple correction loop. Too far to the right, turn left a bit.. This gets complicated.. There is this thing called a PID but that works for a more linear correction like motor speed. But then I found out about the microtransat and the world started looking a whole lot more interesting. A competition to sail an autonomous 4 metre boat across the Atlantic, the minitransat is 6.5 metres and that carries a person. But back to facilitating my laziness, a lot of the microtransat teams have released their software. This helps…. I hope.
- 22/03/2015 at 19:25 #10124Fairey MaryParticipant
So I have been mostly doing calculations and connecting up the motor drivers. This weekend I build a test rig so I can calculate lock to lock speed. The rams have about 130mm travel which I think will take about 8 seconds flat out. I think there is enough leverage which I can halve and double the speed by only using one ram, but I like the symmetry.
 Thanks to some good drawings done when the twin rudders were done I can get a good idea of how things are going to lay out. From this I can see where the rams would go, I hope that I can work around the exhaust.
Thanks to some good drawings done when the twin rudders were done I can get a good idea of how things are going to lay out. From this I can see where the rams would go, I hope that I can work around the exhaust.
I am now fully battling with the feedback loops and am reasonably comfortable that all the kit works. I have plotted the lock to lock speed against the value I request from the motor driver which gives me somewhere between 8 and 20 seconds, the longer is quieter. This is basically flat out in reverse to flat out forwards. I have a hunch most of the feedback loop is correcting against a fixed sample period….. Anyway off to see the boat this week so will forget the technical stuff and get the paint brush out… - 16/07/2015 at 21:20 #10125Fairey MaryParticipant
 Ok, so I have actually been doing something.
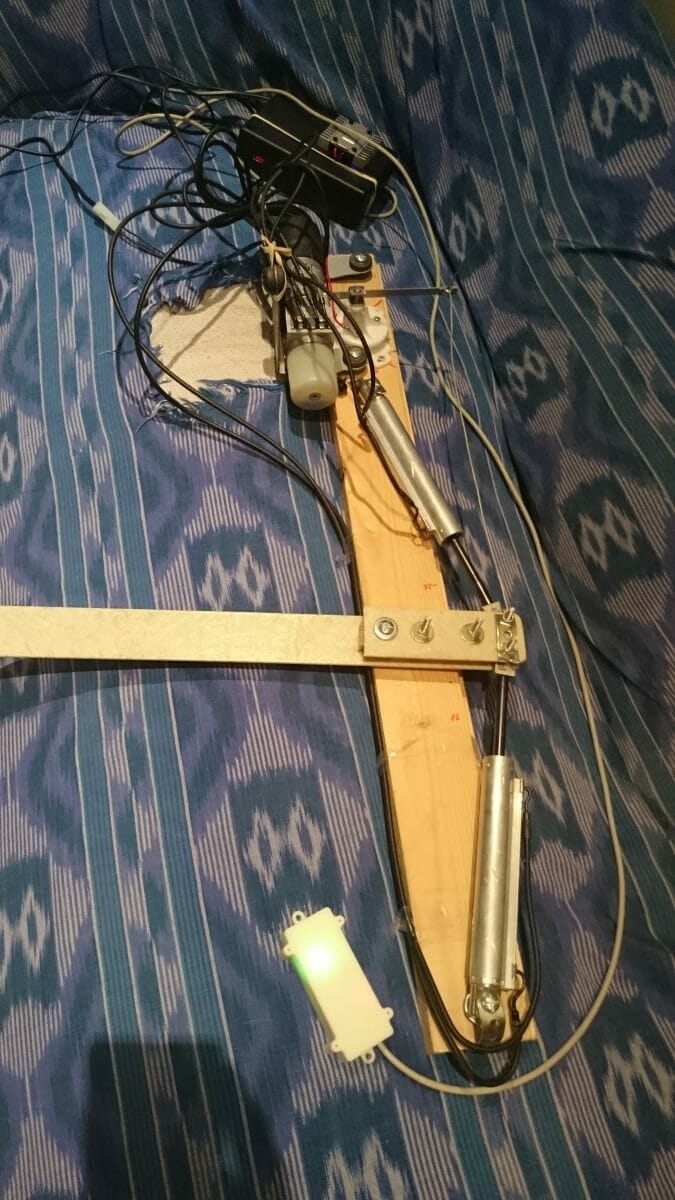
Ok, so I have actually been doing something.I can’t just turn up to the boat and hope it works so I have created a test set up. It is made from an old batten. The pivot point is the left most bolt, I left the length to the left of that to see the speed of movement I would expect from the actual rudder.
From the top; The black box you can see at the top is the project box that contains the arduino and freeboard circuit boards as well as the bluetooth module. You can just make out a red dot which is a 4 digit 7 segment display which I initially used to indicate direction. The metal bit on the top is the motor controller heat sync.
Then coming down you can see the motor and to the right of that the rudder position sensor. There is a bit of fencing wire between that and the end of the ’tiller’.
This is now stand alone and powered by a 12volt car battery I have under my desk.
The cool thing is that I can set the rudder position and it moves to that position.
The difficulties I have between now and a usable system is the quality of the compass which I hope just needs calibrating properly. Unfortunately I have an iron girder near my desk 😉
The other thing that I see as a risky area is the control loop for that includes the compass. I can use the COG from a GPS I have, this de-risks the use of the compass. But it is the tuning of the feedback loop might phase with the motion of the boat if it isn’t tuned properly.
I am using a basic Phase, Integral and Derivitive (PID) loop which I might have to tune based on wave size. I am not sure…
The thing that has made this quite cool is that I have managed to use a bluetooth low energy link to my mobile to do the configuration. The only problem is that I spend too much time making it ‘pretty’ and not enough making it functional. I am learning a lot so sometimes it is more ‘look what I can do’ as opposed to what I need to do.

I hope nobody minds as I have lifted the background image from the Atalanta brochure. The centre of the compass is also an edit from the line drawing.
The idea is that the outer compass is driven by the phones compass so it always points north. The image for the boat rotates within that pointing to its compass bearing. So the image should be aligned with the boat.
The bottom of the screen is, at the moment, three swappable panels for bearing, rudder and GPS speed (obviously, that is important). In the one pictured the smaller number is an editable field which gives the rudder position wanted. The big one is the actual position. I edit the little one and the big one aims at that number. For the rudder it works.
The trick I want to pull off before September is to have the steer by compass bit working. But I don’t have that many weekends left.
But it is looking all very plausible at the moment..
- 20/07/2015 at 08:03 #10126Nick PhillipsParticipant
I am fascinated at your work on this, and to see how this turns out, if a little challenged by the detail of some of what you are doing. As you mention below, clever though the mechanics are, its the feedback / response programming that is going to be the cleverest part of the solution.
I look forward to hearing all about it at West Mersea!And even more to hearing about the sea trials in the Autumn.
- 16/08/2015 at 16:03 #10127Fairey MaryParticipant
I have just packed up the hydraulic rams with the brackets I have had made out of 3mm stainless. So if I have done my maths we should be fine mechanically. I will need to make up a wooden base plate which attached to the top of the old centre rudder stock.
 The electronics took a bit of a turn when fear of dropping the phone got the better of me. I bought a pebble. For those not familiar it is a ‘smart’ watch. Where in this case its intelligence is mostly in keeping it simple. It has a persistent display. I think it is a sharp memory LCD and not exactly an e-ink in the style of the book readers.
The electronics took a bit of a turn when fear of dropping the phone got the better of me. I bought a pebble. For those not familiar it is a ‘smart’ watch. Where in this case its intelligence is mostly in keeping it simple. It has a persistent display. I think it is a sharp memory LCD and not exactly an e-ink in the style of the book readers.The benefits to sailing are that the display is always on and is readable in the sun. Unfortunately the choice of poly-carbon means that it is not exactly polarised lens friendly. But better than an LCD at the wrong angle. Also the big buttons are easier to use than a touch screen when your hands are wet. The thing that surprised me a bit is how light it actually is. It isn’t that difficult to write code for the phone as it is well integrated into the phone. In fact I had a working prototype in a Sunday afternoon. It has taken me days to bring it up to what you see below.
The way I have ‘designed’ it is that up and down keys go up and down by 10 units. The autopilot has 3 control modes compass, GPS (COG shown) and Rudder. The method is chosen by the phone app by virtue of the last setting configured. This is reflected on the watch as the figure top right, the wanted direction. The large figure is the actual measured value. So that would be rudder position or bearing of some form. The text top left is the controller chosen. The number in the outer circle is the speed over ground. I have changed the font since this picture to try to get 3 digits in. The pebble really just acts as a remote control for the phone. There is another neat trick I should do something with. It is a good MOB alarm. All tied in I can turn to wind if the watch gets disconnected from the phone. I just don’t know where the wind is yet…
- 06/09/2015 at 15:17 #10128Fairey MaryParticipant
Ok I spent some time yesterday connecting it up and tested rudder position. Unfortunately I chose less than ideal conditions for testing. Tail end of a mistral and a 3 metre swell. None the less it tends to overshoot to the point of basically full rudder to full rudder. Sounds like tuning is required. The thing that worries me is the predictive tiler action for a swell. I need a fast motor and an algorithm based on pitch. There is nothing like a rogue wave on the stern to test tiller action.
- AuthorReplies






- You must be logged in to reply to this topic.